
HGU_CSEE
Impulse response in the LTI system 본문
Impulse response in the LTI system
LEEGH 2023. 9. 12. 07:19
Property of LTI system: Predictable
For example, I will get one drink if I insert 2 dollars into the banding machine.
Then, when I put 20 dollars in that machine, how many drinks do I get? We can get the answer without something practical. This property is called "Predictable".
We can denote such a system mathematically like this:
y(t)=f(x(t)×h(t))
From that equation, h(t) is the impulse response.
Before impulse response, we need to check about impulse function δ[n]
δ[n]={1,if n=00,Other wise
The impulse function has such property, therefore, it has two statements.
1. ∑∞k=−∞δ[n]=1
2. ∑∞k=−∞δ[n]×f[n]=f[0]
Similarly, in the continuous time area, it can be defined.
δ(t)={∞,if t=00,Other wise
There δ(n) impulse function has a similar property this :
1. ∫∞−∞δ(t)dt=1
2. ∫∞−∞f(t)×δ(t)dt=f(0)

In the continuous-time impulse signal, it isn't discrete Discontinuous does not mean discrete. It is defined as distinctively in the continuous area.
Then, we can get Impulse response h(t) by putting impulse functions into any system.
In other words, we can define impulse response in any kind of function and system. such as LTI, casual, non-linear, etc.
We can calculate the output y[n] by using a sequence of x[n] and an impulse function.
Let's assume that discrete function x[n] is plotted. Therefore, the impulse function is δ[n].
By using the property of impulse function: it has a value of 1 if and only if the time domain equals 0. and otherwise is 0.
Mathematically, we can represent it like this :
x[n]=...x[−2]δ[n+2]+x[−1]δ[n+1]+x[0]δ[n]+x[1]δ[n−1]+x[2]δ[n−2]...
On the same principle, in order to obtain the output of the signal, it is possible to replace the position of the impulse function with the impulse response function.
y[n]=...x[−2]h[n+2]+x[−1]h[n+1]+x[0]h[n]+x[1]h[n−1]+x[2]h[n−2]...
Finally, we can simple relation between input and output.
1. x[n]=∑∞k=−∞x[k]×δ[n−k]
2. y[n]=∑∞k=−∞x[k]×h[n−k]
At the point of equation 2, in the LTI systems, ∑∞k=−∞ means additibility, x[n] means scale, and h[n−k] means time-invariant.
simple exercise -LTI system-
Let's represent discrete-time function x[n] by the sum of the impulse function δ[n] ∵ LTI systems satisfy that a function can be expressed by the sum of functions.
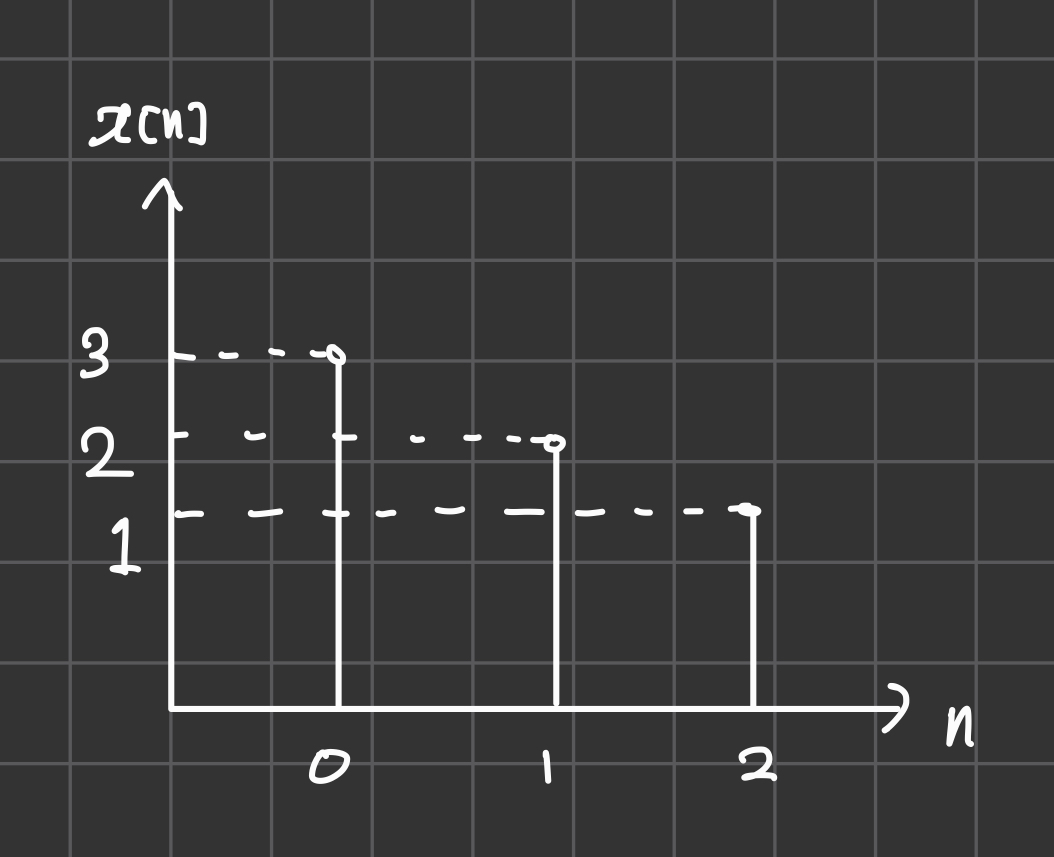
We know that function x[n] is :
x[n]=3×δ[n]+2×δ[n−1]+1×δ[n−2]
in conclusion, we can find the relation between impulse response and impulse function.
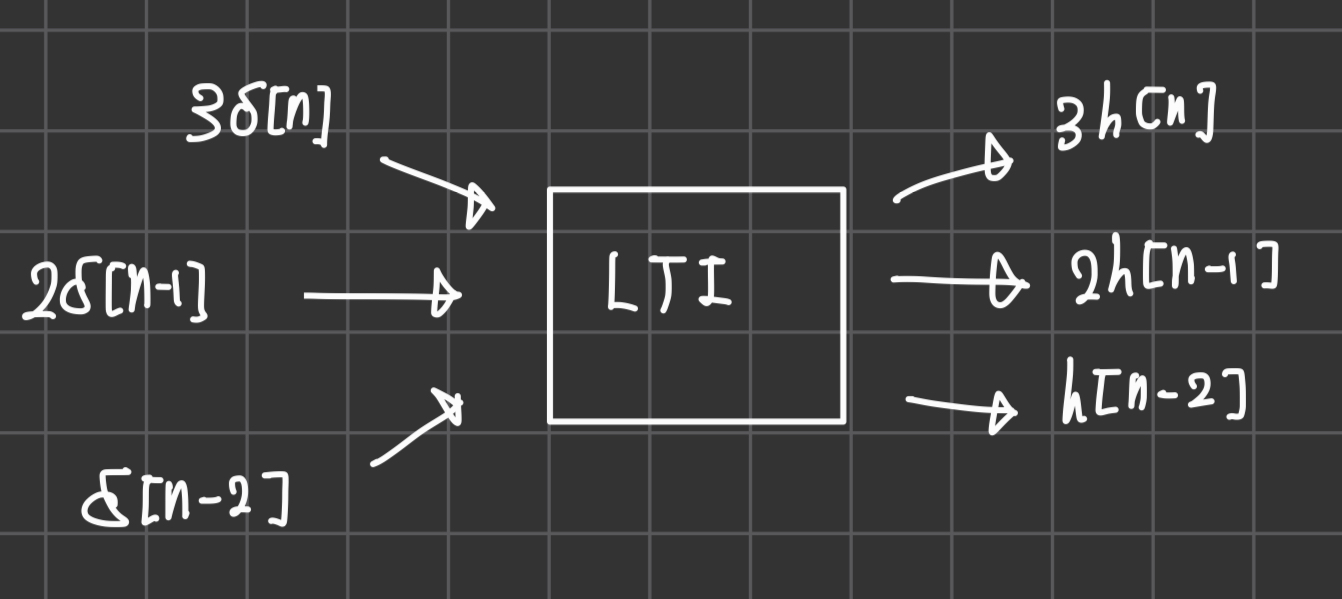
As you can see in Figure 5, by using the LTI system property, we make the equation.
LTI systems satisfy the following:
x[n]=3×δ[n]+2×δ[n−1]+1×δ[n−2], and also that y[n]=3×h[n]+2×h[n−1]+1×h[n−2]
'Electronic engineering > Systems and Signals' 카테고리의 다른 글
| Typical signals-3 1 | 2023.09.09 |
|---|---|
| Typical signals -2 0 | 2023.09.09 |
| [Intro] Typical signals-1 0 | 2023.09.08 |

